 Mobot 2005: Unofficial (and incomplete!) Report
Mobot 2005: Unofficial (and incomplete!) Report
Results
| Team name: | Cornflake |
| Number of gates: | 11 |
| Time: | 1:16.97 |
| Rank: | 1st place |
Technical Information
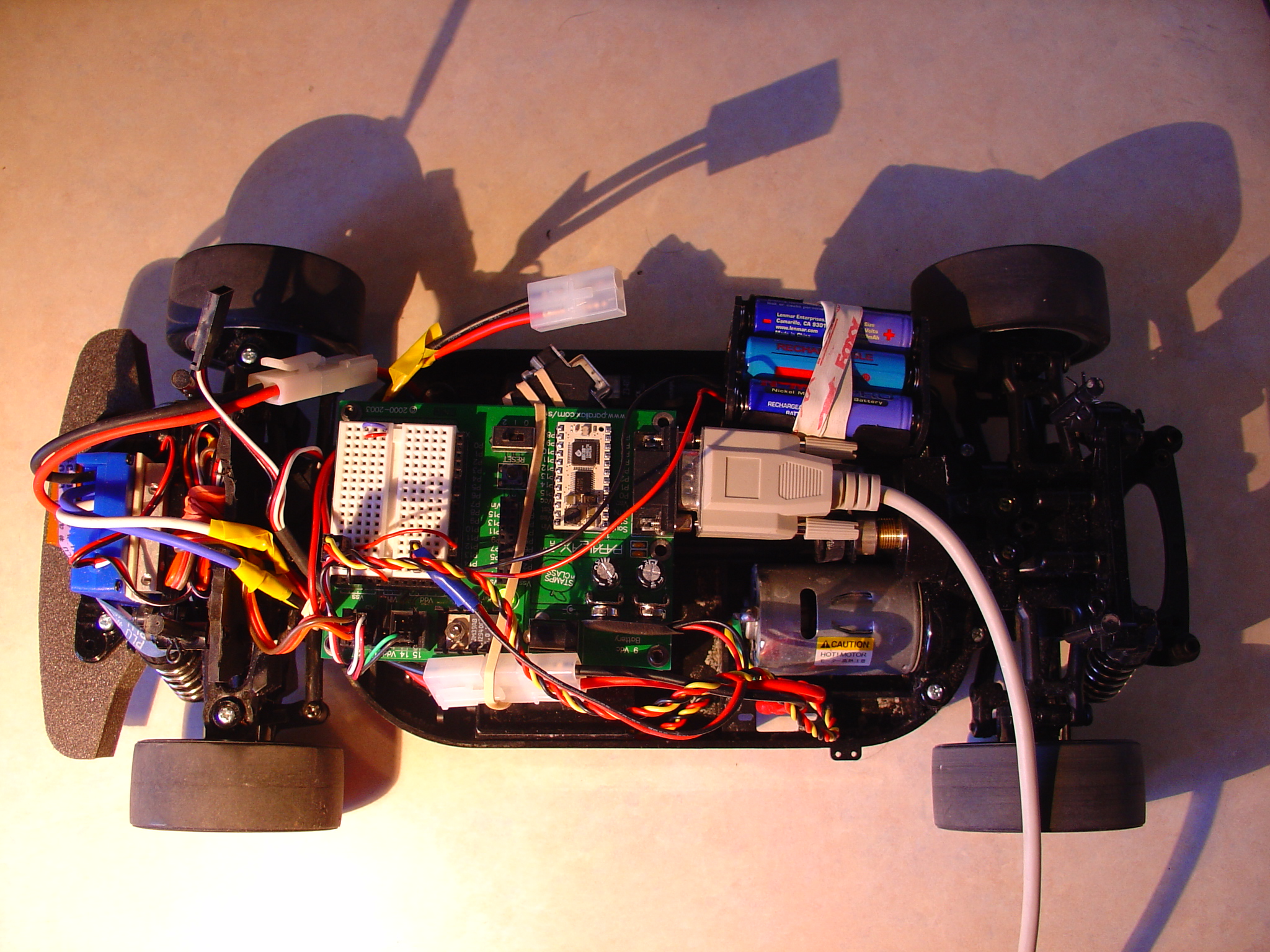
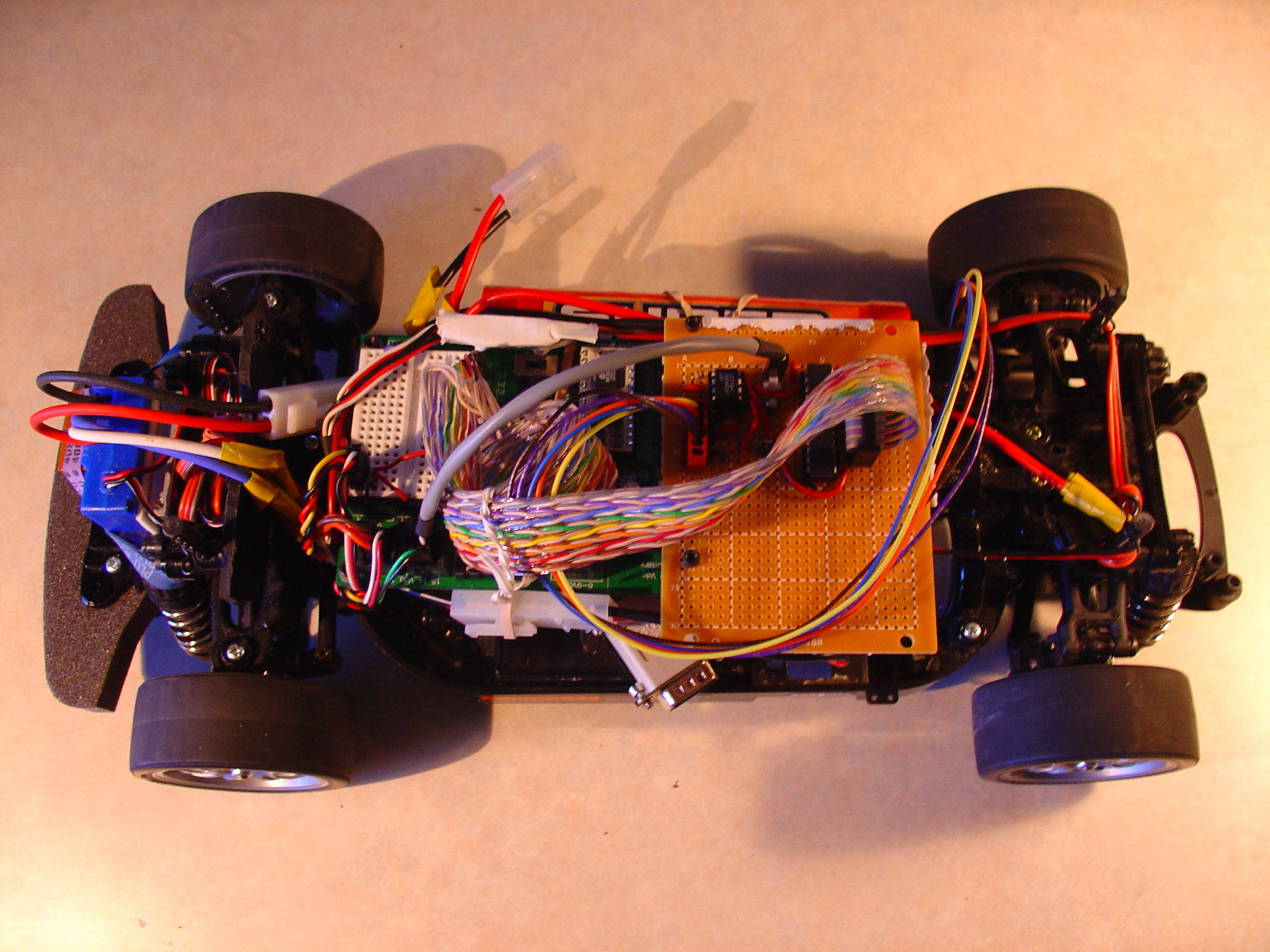
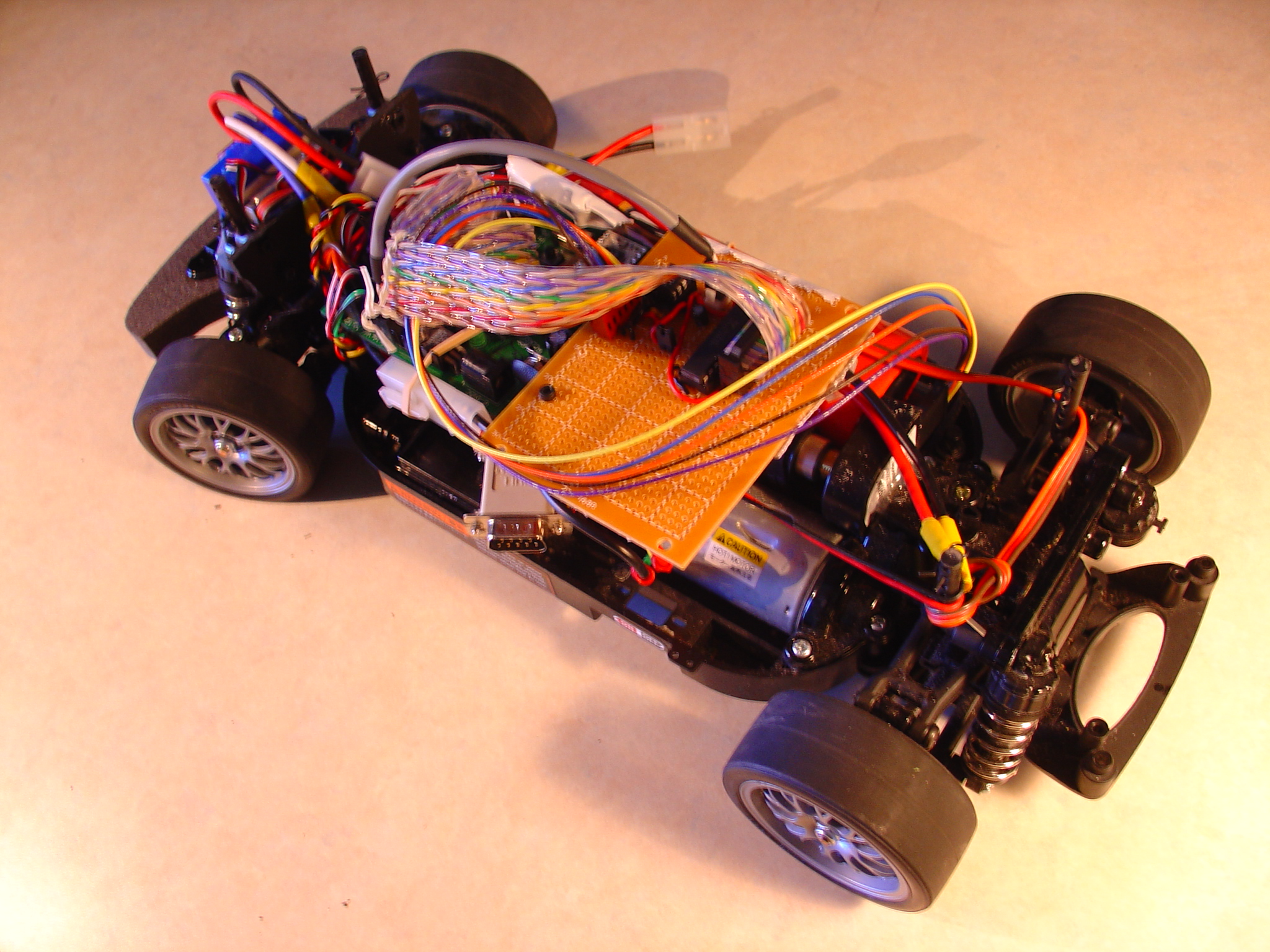
| Chassis: | Commercial RC toy car (Audi TT) |
| Controller: | Parallax Javelin Java Stamp |
| Actuation: | Single motor driving all 4 wheels |
| Standard digital servo for steering | |
| Standard hobby ESC motor driver | |
| Vision: | CMUcam2 in color tracking mode communicating via serial interface |
| Odometry: | Single US Digital encoder attached to main shaft via a belt |
| Quadrature signals converted to up/down ticks | |
| 8-bit counter receives ticks and outputs to controller | |
| Theoretical precision: 0.1" linearly (1-D, assuming line followed exactly) | |
| Speed control: | Simple (but effective) proportional velocity control |
Pictures
Movies
All the movies taken this year were embarrassing debugging videos. See last year's mobot for something similar. Note the lack of intelligent speed control and decision point logic.
Good Points
Less Than Good Points
Future Plans
Other Information
We received a $1000 SURG grant for this project, for which Dr. Garth Zeglin kindly offered to serve as advisor. A complete report and budget sheet in fulfillment of the requirements of the grant will be submitted separately at the end of this semester. A significant portion of this SURG project is the design of a custom microcontroller board, which didn't get finished in time for the race. Schematics and a board layout will be presented at Meeting of the Minds along with the rest of the mobot report.
Links
Last modified: 4/19/2005
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}